Robust Online Calibration for UWB-Aided Visual-Inertial Navigation with Bias Correction
Published in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Authors: Yizhi Zhou, Ziwei Kang, Jiawei Xia, Xuan Wang
Links:
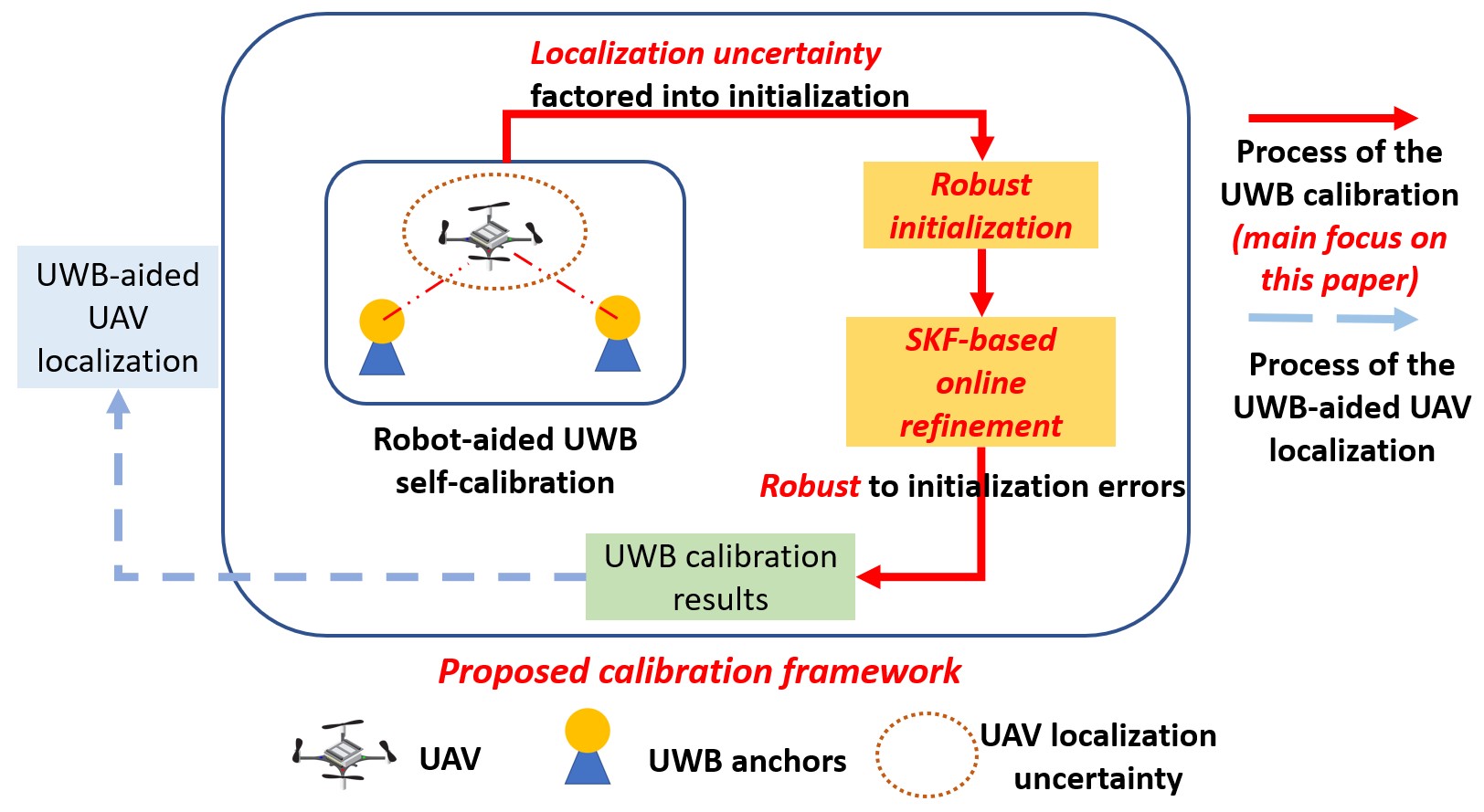
Abstract Figure